[VIP第1年] 指数:3
[VIP第1年] 指数:3
例如:寻找,运输,握取,对准,装配,检验等动作. 为了明确地描述工业机械人,美国机械人协会在1979年将机械人定义为一个可用程式控制,多功能的操作器,它透过程式控制和多变化的动作设计来移动材料,工件,工具或特别设备,以完成一连串的工作.所以,虽然许多工业机械人并非有人的形态,但只要它们符合机械人的定义,便可以称为机械人.工业机械人虽然已被广泛应用在多种制造行业内,但估计在不久将来还会有数以十万计的工业机械人投入服务.现时,不少研究人员正为机械人研究如何加入视觉和感觉,令机械人可以完成更复杂的工作.而研究机械人的学问称为机械人学。手臂自重轻,其启动和停止的平稳性就好。深圳本地晶圆运送机械吸臂维修
中国拥有庞大的制造业,是世界弟一工业机器人市场,有着1000多家与工业机器人相关的企业。但是现阶段中国在机械臂制造领域处于大而不强的状态。拥有自主品牌的工业机械臂的数量和市场占有份额偏低。现在国内很多机器人企业有很多都不是在真心实意地在做技术,很多都是跟着国家提出的中国未来制造的政策与支持来进行获利的。而且很多符合精度要求的关键零部件很大程度上依赖于进口。所以,中国的机械臂在技术方面远远落后于国外,占有的只是低端市场的份额。不过,在非民用机器人与航天机械臂领域,中国的技术也不逊色于美国。所以说只要经过技术的积累,中国的机械臂技术也会不比国外的差多少。 深圳本地晶圆运送机械吸臂维修对了悬臂式的机械手,还要考虑零件在手臂上布置。

进行光刻:
将设计好的电路掩模,置于光刻机的紫外射线下,然后再在它的下面放置Wafer,这一刻,Wafer上被光刻部分的光刻胶被融化掉,刻上了电路图。然后将光刻胶去除,光刻胶上的图案要与掩模上的图案一致,然后进行再次光刻。一般来说一个晶圆的电路要经过多次光刻。而随着技术革新,极紫光刻出现了,现阶段光刻的效率变得比以前更高,甚至于可以达到光刻一次完成。
注射:
在真空下,将导电材料注入晶圆的电路内部。其真空的标准比无菌室或ICU还要高出千万倍。
出了通用二自由度空间模块(TODOM)的概念,并以通用TODOM作为空间机械臂的构造模块。TO-DOM由两个旋转模块及一个连接模块共三个基本模块组成。根据空间机械臂的具体构型需要,将TODOM的三个基本模块之间的机械接口进行专门设计,即可配置成确定构型的二自由度关节。由这样数个不同构型的二自由度关节可以组装出具有偶数个自由度的空间机器臂。采用一体化概念设计的TODOM减小了关节的质量与体积,提高了系统的可靠性。通过对由TODOM构成的一套二自由度关节进行的试验初步验证了TODOM设计概念的合理性及可行性。对于粉尘作业的机械手还要添装防尘设施。
装配机械人 ;这灯机械臂要有较高的位姿精度,手腕具有较大的柔性。目前大多用于机电产品的装配作业。⒌专门用途的机械臂 如医用护理机械臂、航天用机械臂、探海用机械臂以及排险作业机械臂等。三、按操作机的位置机构形式和自由度数量分类机械臂操作机的位置机构型式是机械臂重要的外形特征,按这一类标准,机械臂可分为直角坐标型,圆柱坐标型,球(极)坐标型、关节型机械臂(或拟人机械臂)。操作机本身的轴数(自由度数)**能反应机械臂的工作能力,也是分类的重要依据。按这一分类要求,机械臂可分为4轴(自由度)、5轴(自由度)、6轴(自由度)、7轴(自由度)等机械臂。还有其它多种分类方式。基本介绍工业设计工业机械人通常由六项基本元素所组成,包括:结构,臂端工具,电脑数码控制器,驱动器,量度回输系统和感应器。加设定位装置和行程检测机构。深圳本地晶圆运送机械吸臂维修
手臂伸缩机构是机械臂伸出和缩回的伸缩位置检测器作用基本等同于升降位置检测器。深圳本地晶圆运送机械吸臂维修
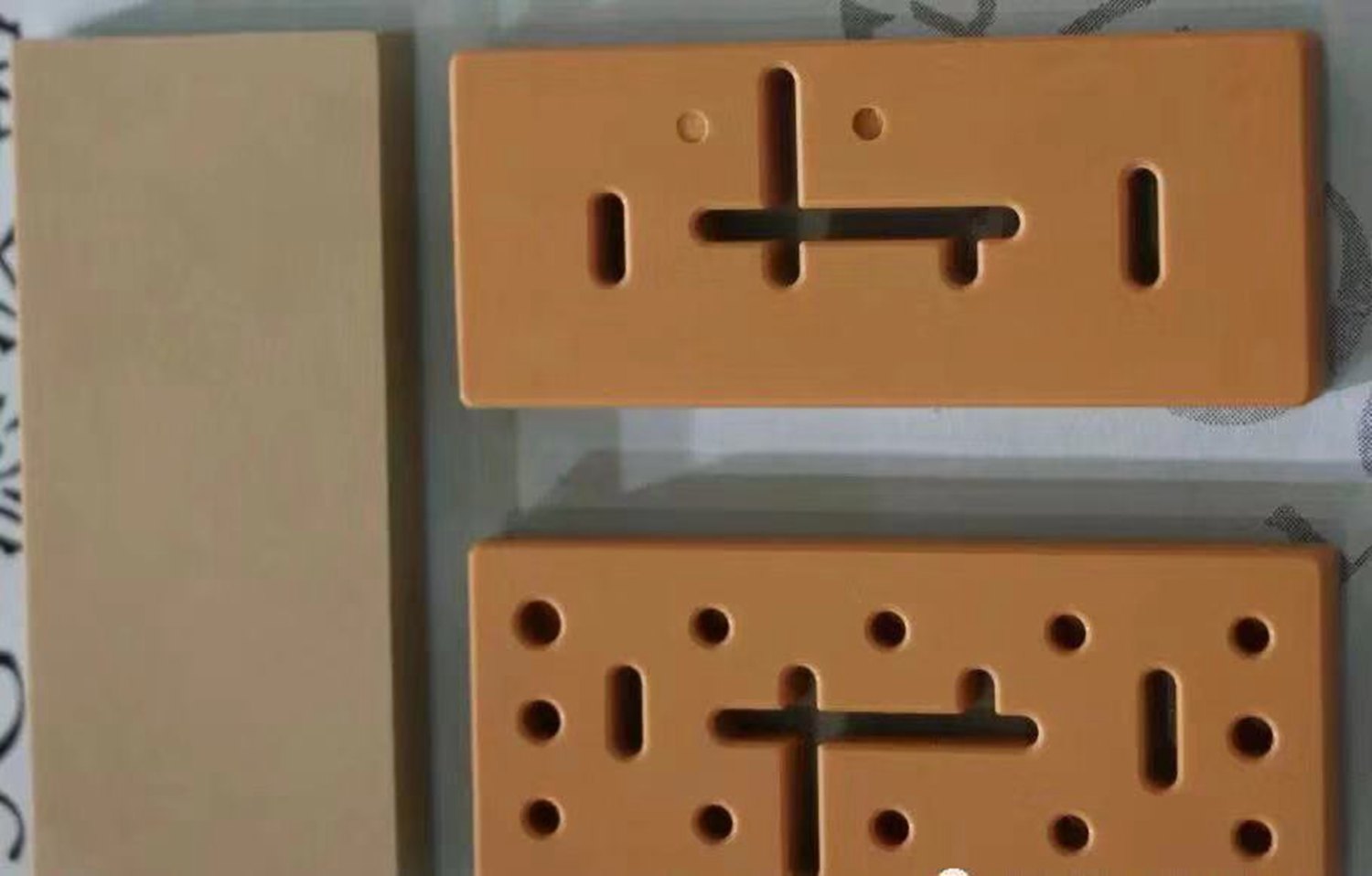
一种晶圆传输装置及其真空吸附机械手,该真空吸附机械手包括:手臂;固定在所述手臂上的吸附绝缘凸台;设置在所述手臂和吸附绝缘凸台内的真空气道;所述吸附绝缘凸台用于吸附待传送晶圆的背面,所述吸附绝缘凸台的硬度小于所述待传送晶圆的背面的硬度。由于吸附绝缘凸台的硬度小于待传送晶圆的背面的硬度,故利用真空吸附机械手将晶圆传送至所需位置之后,晶圆的背面中与真空吸附机械手接触的位置不会形成印记,提高了晶圆的合格率。深圳本地晶圆运送机械吸臂维修
深圳市德澳美精密制造有限公司是专业从事“氧化铝陶瓷|氧化锆陶瓷|碳化硅陶瓷|陶瓷机械手”的企业,公司秉承“诚信经营,用心服务”的理念,为您提供质量的产品和服务。欢迎来电咨询!
文章来源地址: http://dzyqj.jzjcjgsb.chanpin818.com/dzcllbjjgj/bdtcl/deta_27754151.html
免责声明: 本页面所展现的信息及其他相关推荐信息,均来源于其对应的用户,本网对此不承担任何保证责任。如涉及作品内容、 版权和其他问题,请及时与本网联系,我们将核实后进行删除,本网站对此声明具有最终解释权。